Fotografie: Digitalizační stolice II
← Předešlá • CNC • Následující →
Luděk H • 18. 12. 2017
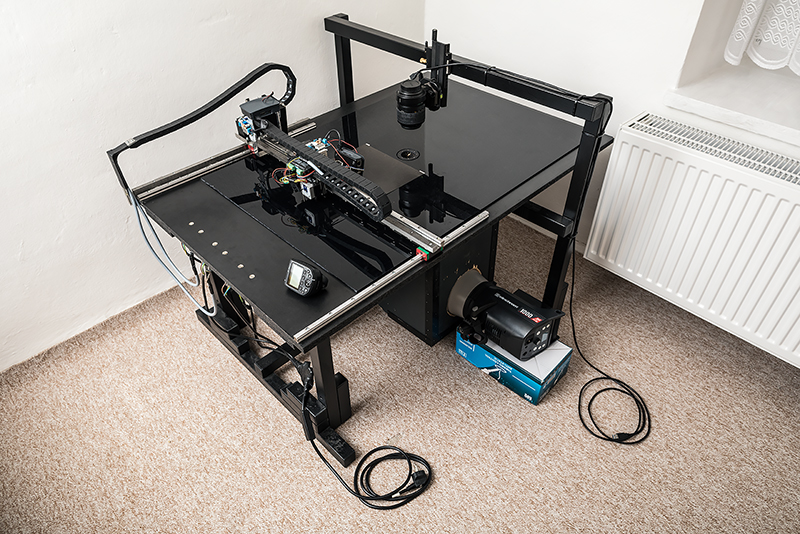
Osa Z, přítlak digitalizované části filmu, předělána kompletně, včetně použití silnějšího krokového motoru.
Zařazení pod klíčové výrazy
Fototechnika: Canon EF 24mm f/1.4L II USM Canon EOS 5D Mark IVKategorie: Dokument Technika
Projekt: CNC Digitalizační stolice
Záznamové médium: 24x36 mm digi (FF)