Projekt 12″
3D Makro
 Lineární technika VI
Lineární technika VILuděk H
 3D makrem jsem nazval svůj další dlouhodobější projekt. Pro svůj odpor k "barevným ujetinám", na které se musí koukat přes speciální brýle a stejně to i potom trojrozměrny někteří (jako já) nevidí, jsem zvolil v tomto směru trochu kontroverzní název. Před časem jsem měl možnost zjistit, že má tato má myšlenka i anglické pojmenování Stack-and-stitch. Tedy složit-a-sešít. 3D je tedy v tomto mém pojetí ne pojem popisující výstup (jako to bývá u 3D fotek použito), ale pojem popisující způsob pořízení snímku.
3D makrem jsem nazval svůj další dlouhodobější projekt. Pro svůj odpor k "barevným ujetinám", na které se musí koukat přes speciální brýle a stejně to i potom trojrozměrny někteří (jako já) nevidí, jsem zvolil v tomto směru trochu kontroverzní název. Před časem jsem měl možnost zjistit, že má tato má myšlenka i anglické pojmenování Stack-and-stitch. Tedy složit-a-sešít. 3D je tedy v tomto mém pojetí ne pojem popisující výstup (jako to bývá u 3D fotek použito), ale pojem popisující způsob pořízení snímku.
3D - tři dimenze tedy znamenají vyfocení Nz snímků do hloubky (v ose Z), Nx snímků do šířky (v ose X) a Ny snímků na výšku (v ose Y). Běžně se pro focení s posuvem v osách X nebo Y používá pojem focení panoramat a ke složení je využíván software na skládání panoramat (např. Kolor Autopano Giga). Tento postup plánuji využít i v tomto mém projektu, kdy pro složení snímků v ose Z jsem zvolil program Zerene Stacker. To je postup týkající se zpracování pořízených snímků, do kterého samozřejmě spadá také předzpracování RAW souborů přes Adobe Camera Raw - se zvoleným přednastavením a převodem do TIFF.
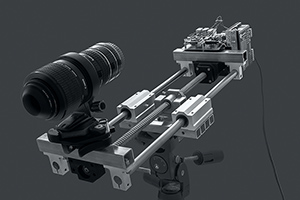
Větší výzvou projektu je ale část mechanicky technická - řešení způsobu pořízení později v počítači zpracovávaných a skládaných snímků. Tu jsem chtěl maximálním možným způsobem automatizovat. Důvody jsou jasné, víc mě zajímá výsledek a práce na něm než trávit čas ručním pořizováním kvanta potřebných snímků. Tím spíš, že ruční zásahy během focení znamenají riziko vnášení chyb. Tyto chyby pak mohou následně způsobit také chyby či problémy při spojování většího množství snímků do jednoho výsledného. V případě pořizování stovek snímků je tedy lepší volbou automatizace, která minimalizuje chybovost.
S tímto projektem je i spojená myšlenka na bezdrátový modulární systém řízení. Ten bych rád využil i v jiných svých projektech, z nich digitalizační stolice už je moduly osazena a časem snad přijde i ULF technická kamera či jiné CNC nástroje. A protože už je první osa pro 3D makro z velké části dokončena (osa Z) a myšlenka prozatím nenarazila na nepřekonatelnou překážku, je nejvyšší čas sepsat k projektu těchto pár slov. Prozatím nemám vyřešenu přesnou synchronizaci bezdrátově řízeného systému os v případě ovládání více jak jedné osy v jeden okamžik (složené pohyby), ale i to by mělo být možné vyřešit. Pro současné projekty tato synchronizace není potřebná.
Myšlenka bezdrátového modulárního systému řízení znamená, že v lokální bezdrátové síti je umístěno řídící PC (či jiné zařízení, klidně i tablet či mobil), které vydává příkazy k pohybu zvolených os pomocí HTTP REST. Bezdrátově řízená osa má v takovém sytému přívod pouze napajecího napětí (dva dráty, aktuálně využívám +36 V a zemnící vodič). Pokud by nebyla velkou překážkou omezená doba práce, pak by bylo možné umístit ke každému takovému modulu akumulátor a tedy mít každou osu zcela bezdrátovou. Pokud dojde k revoluci ve světě akumulátorů, bude tato možnost o to víc nasnadě.
Postup v sestavování první osy
Související galerie
Skládané makro
https://12in.cz/dgalerie/id/14_Skladane-makroSnímky vzniklé využitím vyvíjeného CNC mikroposuvu řízeného přes Wi-Fi.
Zařazení pod klíčové výrazy
Fototechnika: Canon MP-E 65mm f/2.8 1-5x MacroKategorie: Dokument Makro (při zvětšení nad 10:1 po 1:1) Technika
Projekt: 3D Makro CNC
Záznamové médium: 24x36 mm digi (FF)